Rescue Rover
Projects | | Links:
There was no specific requirement in this project, only that Bluetooth and some combination of sensors needed to be used and that it had to achieve or serve some sort of “novel purpose”.
So the team went with a “rescue rover”, initially designed for cheap archaeological or forensic surveying, but then inspired by the (at the time) recent world event in Thailand.
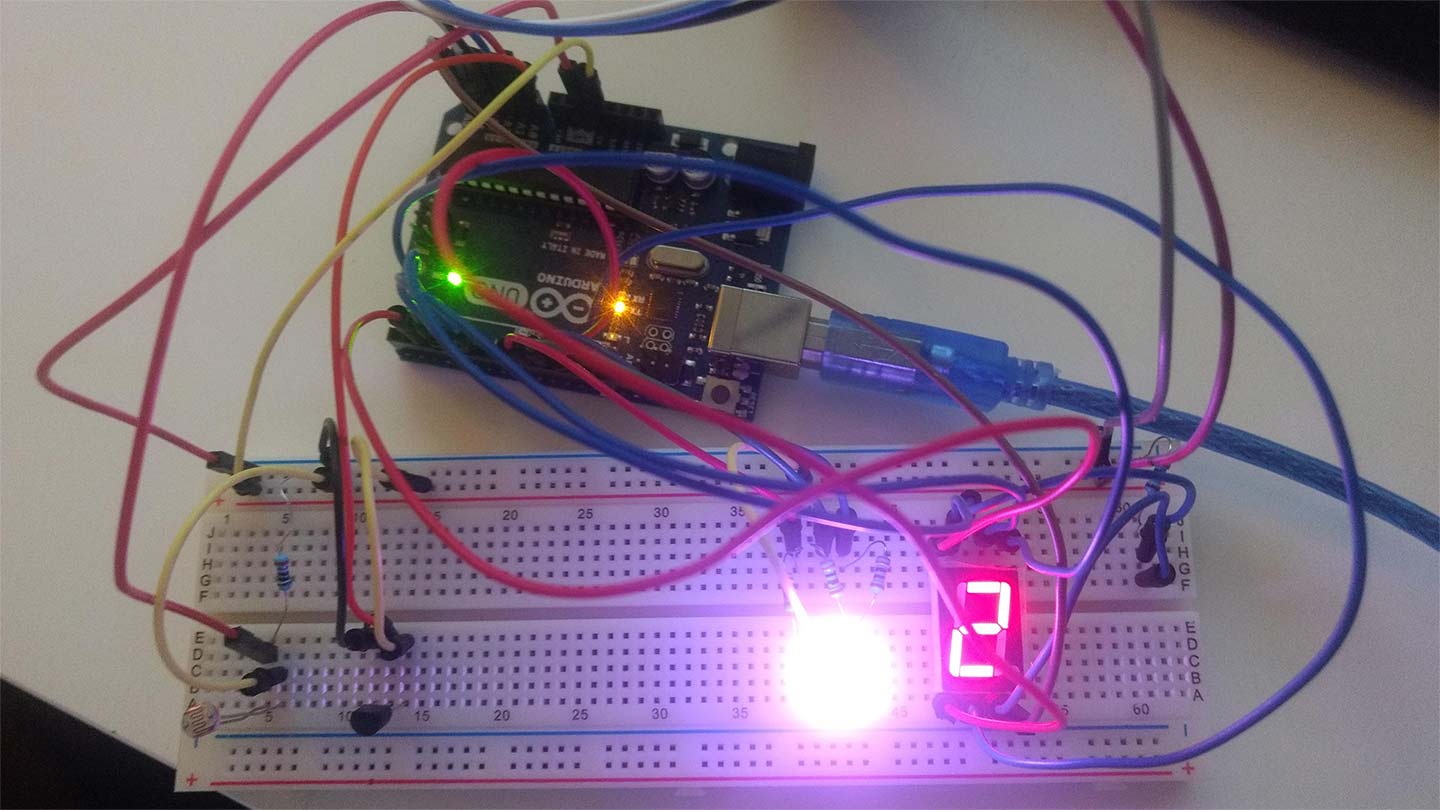
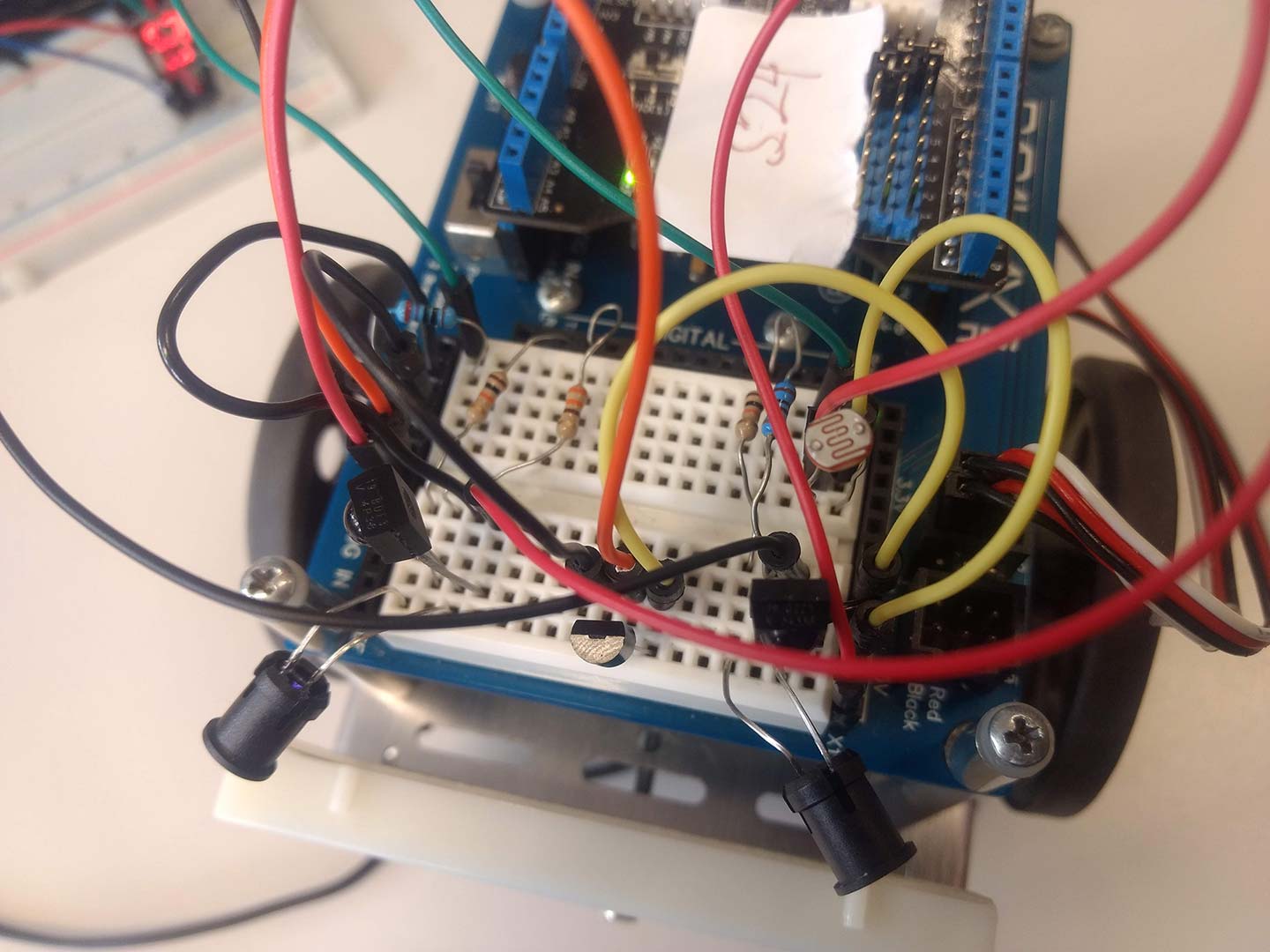
The idea was that you’d take a rugged chassis - sealed, waterproof, shock resistant and whatnot - and have it carry a bunch of cheap, expendable but exposed sensors so the information can be transmitted back wirelessly. The visualisation of this is shown on the breadboard in the image above, with the warmth of the light representing temperature and the number on the 7 segment display representing the light intensity.
More sensors could’ve been added, but we were constrained by the available pins and space on the breadboard affixed to the robot kit.
Overall, a great learning of computer systems and crash course into basic electrical engineering (for computers). Particularly, writing assembly code for the AVR architecture gave a far greater appreciation of how computers work given the usual level of abstraction programmers work with.